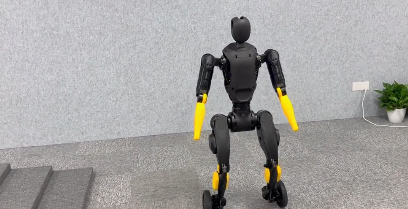
当多数服务机器人还在单一运动模式中寻求性能突破时,智元公司近日推出的 “哪吒机器人灵犀 X2-N” 以 “轮足双形态切换” 设计撕开了行业创新的新切口。这款机器人的核心竞争力,在于通过形态转换实现 “越障能力” 与 “移动效率” 的矛盾统一 —— 足式状态下,它能盲走上台阶、负载 12 斤重物稳健前行,仿生关节设计使其在复杂地形中展现出类似人类的平衡逻辑;而切换至轮式形态后,“边走边滑” 的动态特性让它在单边桥、斜坡等场景中实现时速提升 300%,甚至在外部推搡下仍能保持机身稳定,抗冲击算法的鲁棒性可见一斑。
这种 “双形态智能” 的底层逻辑,暗合了 AI 硬件从 “功能单一化” 向 “场景自适应” 的进化趋势。对比波士顿动力 Atlas 机器人 2.5 米的越障高度或特斯拉 Optimus 的拟人化步态,灵犀 X2-N 的创新更具实用主义色彩:在工厂物流场景中,轮式形态可沿预设轨道高效运输物料,而当遭遇产线障碍物时,足式形态能即时切换完成越障;在灾后救援场景下,它既可以通过轮式快速抵达灾区外围,又能以足式穿越瓦砾堆实施精准作业。智元技术团队透露,该机器人搭载的双模驱动系统采用了轻量化镁合金骨架与高扭矩伺服电机的协同设计,整机重量控制在 45 公斤以内,却实现了负载 - 体重比 1:3.7 的行业领先数据。
值得关注的是,灵犀 X2-N 的发布恰逢 AI 硬件商业化的关键节点。从英伟达收购 CentML 强化 GPU 性能优化,到腾讯开源 “混元 - A13B” 大模型推动软件算法升级,整个行业正形成 “硬件形态创新 + 软件智能进化” 的双向驱动。正如皮克斯创意官彼特・道克特所言,当前 AI 技术在创意领域仍显乏力,但在工具型场景中,像灵犀 X2-N 这样的硬件创新正在重新定义 “人机协作” 的边界 —— 它不是简单替代人类劳动,而是通过形态智能成为连接物理世界与数字指令的 “动态接口”。
在 AI 监管争议与技术乐观主义交织的 2025 年,灵犀 X2-N 的双形态设计或许揭示了一个更务实的方向:当大模型还在为 “幻觉问题” 争论不休时,硬件端的场景化创新已悄然开启。从轮式到足式的切换,不仅是机械结构的变换,更是 AI 从 “云端智能” 向 “边缘执行” 落地的关键一步 —— 毕竟,能在工厂产线稳稳搬起 12 斤零件的机器人,比任何 PPT 上的技术参数都更接近产业真实需求。